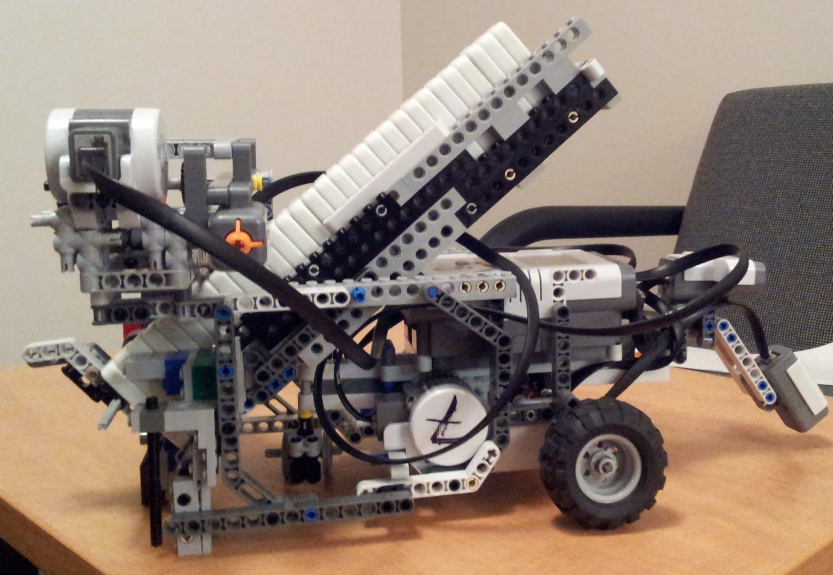
NXT Domino Laying Robot
2012
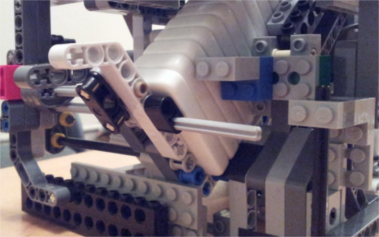
For the final project of our first semester in Mechatronics, we built a Lego NXT robot for laying dominoes, maximizing the satisfaction of toppling dominoes without the pain of erecting them again. The robot uses a PID controller to follow a black line on the ground with built-in obstacle avoidance. The whole system uses three motors, two for driving and one for laying dominoes. The dominoes are gravity fed, and a reciprocal motion ejects the dominoes from the robot.