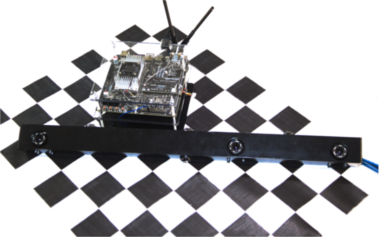
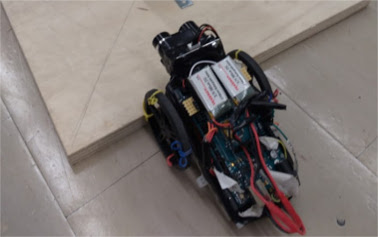
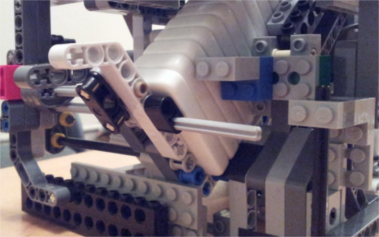
The robot is designed for our third-year Mechatronics design course. The objective is to send a “rescue robot” from a base on one side of the “mountain” to a location on the other side of the “mountain” marked by a pole. The “mountain” is a piece of plywood with a ramp on one side and a sheet metal covered section on the other. Our solution to this problem was a lift that carried a small robot over the top and releases it on the other side. The lift is controlled by a simple logic circuit with limit switches eliminating the need for a microcontroller. The small robot used a laser range finder to locate the base and uses encoders on both wheels to ensure straight travel.